S5 - LÉVY WALKS - ROBOTIC SIMULATION

SCUOLA
Istituto Tecnico Tecnologico Fedi-Fermi Pistoia
INVENTORI
Jacopo Niccolai 5IB
Alessandro Mencarelli 5IA
ANNO DI IDEAZIONE DELL’OPERA
2017
DESCRIZIONE DELL’OPERA
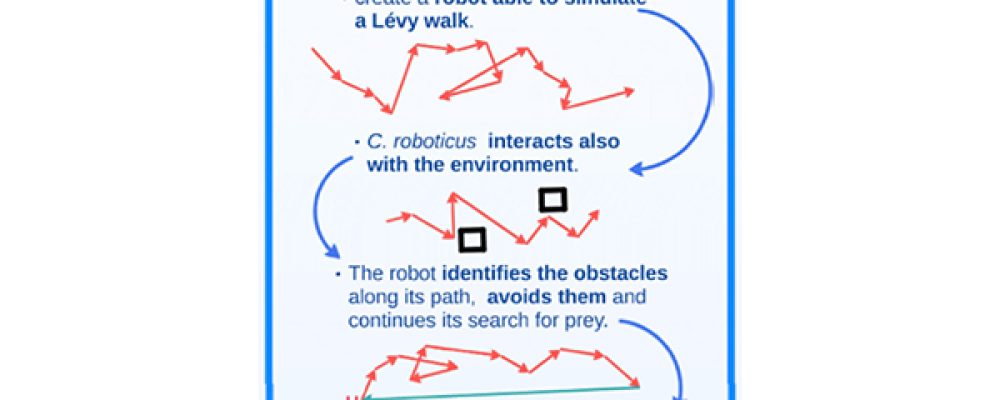
L’idea è di realizzare una simulazione robotica capace di riprodurre ciò che, nella teoria della probabilità, è rappresentato dal processo di Lévy (dal matematico francese Paul Lévy che ha sviluppato una distribuzione che descrive questo processo di natura stocastica).
Secondo il parere di alcuni scienziati e ricercatori, questo tipo di teoria scientifica riuscirebbe a descrivere gli spostamenti che determinate tipologie di animali effettuano per cercare cibo all’interno di un’area nella quale possono trovarsi anche ostacoli.
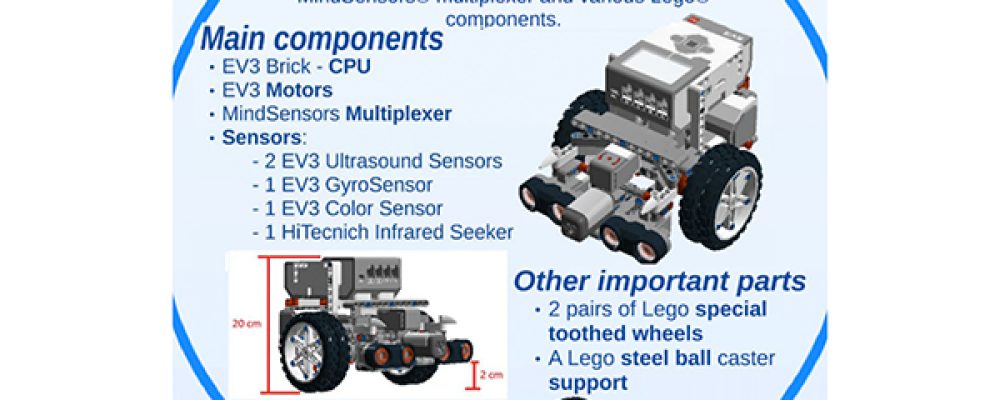
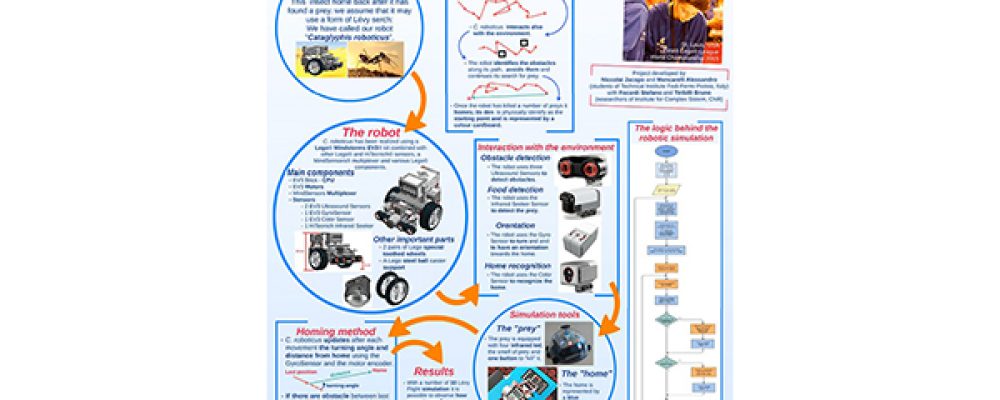
Obiettivo principale del progetto è quello di comparare i dati raccolti dalle simulazioni robotiche a quelli ricavati da ricerche scientifiche effettuate studiando il moto di specie viventi. Ad esempio la formica Cataglyphis, per verificare se si muove nell’ambiente alla ricerca di cibo seguendo o meno il modello matematico che regola un Lévy-Walk. Il progetto, dopo una modellazione matematica dettagliata del processo di Lèvy, ha previsto anche la sua implementazione su di un robot fisico realizzato ad hoc. In particolare, il prototipo robotico che simula il “Lévy-Walk” prende in considerazione sia la parte matematica e le varie formule secondo cui viene generato il moto, che la parte di interazione con l’ambiente esterno circostante.
PRINCIPALI UTILIZZI
Il progetto può essere utilizzato a fini dimostrativi per quanto riguarda lo studio del processo di Lévy combinato allo studio sperimentale su come determinate specie animali ricercano le prede.